




-
Recent Posts
- Image Processing for Environmental Science: PROTINUS Demo
- Image Processing for Environmental Science: Multi-sensing for Marine Sciences (MUSE)
- Image Processing for Environmental Science: PROTINUS
- Automatic Lip Tracking: Bayesian Segmentation and Active Contours In A Cooperative Scheme
- Automatic Lip Tracking: Demo
Recent Comments
Archives
Categories
Meta
April 2024 M T W T F S S 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
Projects
Image Processing for Environmental Science: PROTINUS
Pore network in the soil
PROTINUS “PROviding new insighT into INteractions between soil fUnctions and Structure” is financed in the framework of a H2020 project (MSCA Research and Innovation Staff Exchange). The project assembles a multi-disciplinary team from the EU and three associated countries, namely France, Italy, Denmark, New Zealand, Mexico and Japan, coming from Research Institute and Universities as well as private companies. These teams combine advanced, experimental and theoretical research expertise in soil physics and chemistry, microbiology, image analysis, computer sciences, and systems modelling.
Click here to go to the PROTINUS website.
Automatic Lip Tracking: Bayesian Segmentation and Active Contours In A Cooperative Scheme
Automatic lip tracking
An algorithm for speaker’s lip contour extraction is presented here. A color video sequence
of speaker’s face is acquired, under natural lighting conditions and without any particular make-up.
First, a logarithmic color transform is performed from RGB to HI (hue, intensity) color space. A
statistical approach using Markov random field modelling helps to segment the mouth area, integrating red hue and motion into a spatiotemporal neighbourhood. Simultaneously, a Region Of Interest (ROI) and relevant boundaries points are automatically extracted. Next, an active contour using spatially varying coefficients is initialised with the results of the preprocessing stage. Performance of active contours are greatly improved when initialisation is close to the desired
features. Finally, an accurate lip shape with inner and outer borders is obtained with good quality
results in this challenging situation.
Click here to see the demo in our Demos page.
Recent Advances in Online Computational Stereo Vision
Recent Advances in Online Computational Stereo Vision
We present a fully featured, web-based, online autostereogram creation system [bibcite key=webIvcnz11,minhPhd] that allows a user to upload their own stereo images, generate depth data via computational stereo vision, and then turn this depth data into an autostereogram. The system can also perform the reverse process and extract depth data from a given autosteregram or generate anaglyphs from them. By leveraging the parallelism of modern graphics processors (GPUs), the system can process video streams, creating depthmaps and converting them into autostereogram videos at real-time frame-rates transmitted over the internet. For usability the system provides automatic image rectification for the user provided stereo image pairs. These novel features place the system ahead of current alternatives and allows a wide variety of users to experience stereo reconstruction and autostereogram generation in a quick and easy manner. Additionally, the system could serve as a platform for online based visual perception studies.
Click here to go to the Project page.
Online Autostereogram Creation using Stereo Vision Technique
Online Autostereogram Creation using Stereo Vision Technique
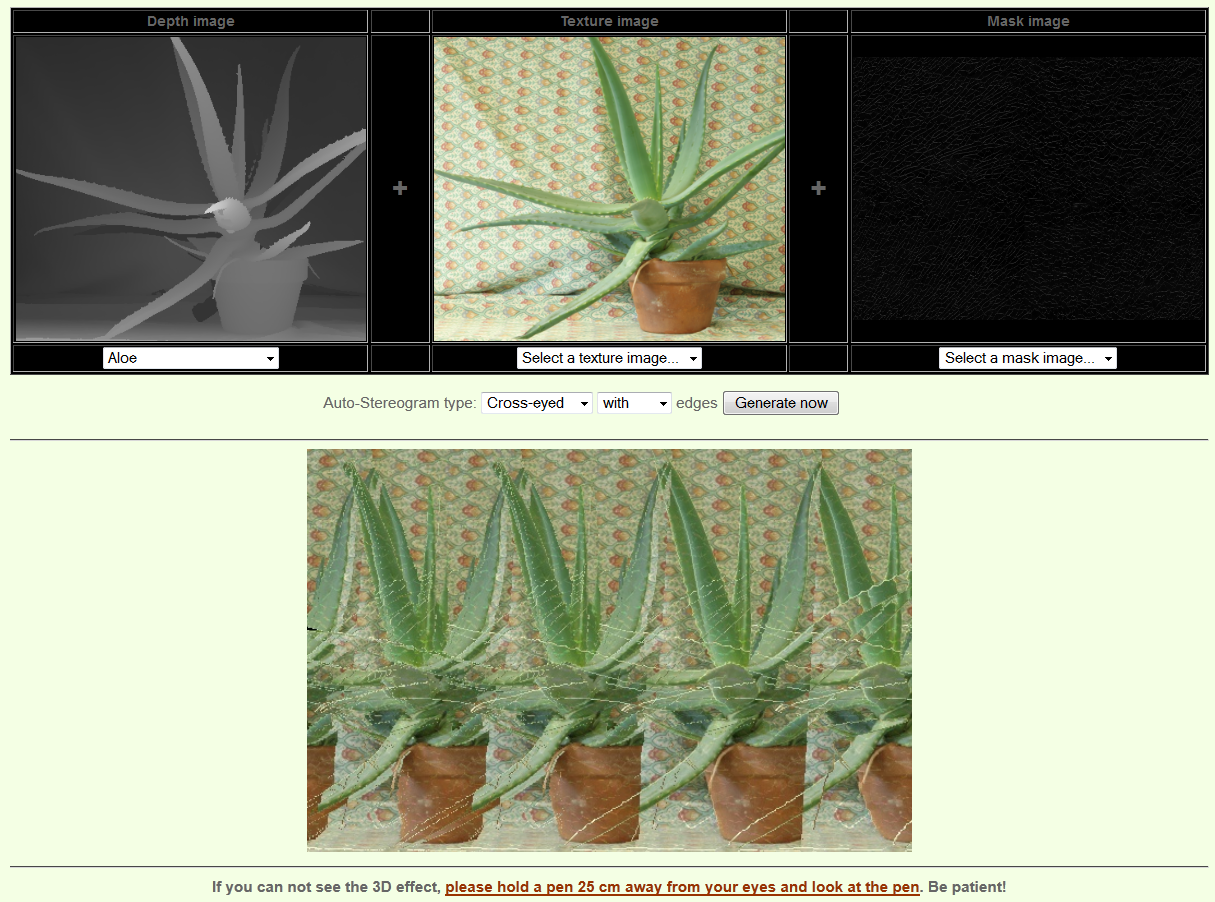
We present a fully featured, web-based, online autostereogram creation system that allows a user to upload their own stereo images, generate depth data via computational stereo vision, and then turn this depth data into an autostereogram.
The system can also perform the reverse process and extract depth data from a given autosteregram or generate anaglyphs from them.
By leveraging the parallelism of modern graphics processors (GPUs), the system can process video streams, creating depthmaps and converting them into autostereogram videos at real-time frame-rates transmitted over the internet.
For usability the system provides automatic image rectification for the user provided stereo image pairs.
These novel features place the system ahead of current alternatives and allows a wide variety of users to experience stereo reconstruction and autostereogram generation in a quick and easy manner.
Additionally, the system could serve as a platform for online based visual perception studies.
A Fast and Simple Method to Simulate 3D Scene View Navigation, Generated from a Pair of Stereo Images
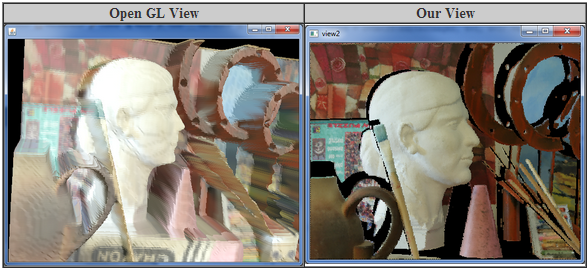
A Fast and Simple Method to Simulate 3D Scene View Navigation, Generated from a Pair of Stereo Images
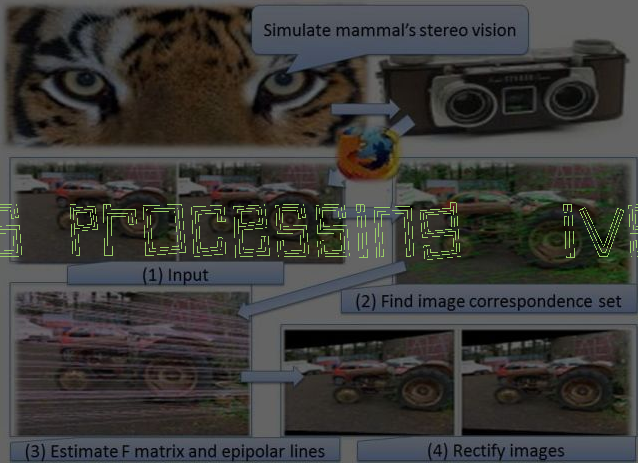
Our versatile web-based system allows users to dynamically generate visible surfaces of three-dimensional (3D) scenes from stereo pairs from monocular or stereo cameras including web-cams.
The current advanced version accepts static images or live video sequences from different imaging sources (via direct or indirect Internet uploads), rectifies these images automatically, and processes the rectified images to reconstruct the scene by one of the available stereo matching algorithms.
Results of processing are returned to the user in multiple formats, such as a disparity map, an anaglyphic image, an autostereogram, a virtual WebGL-HTML5 or Java3D scene, a 3D .OBJ file, or a live depth video. The present system is portable, simple to set up and operate, and currently available online at http://www.ivs.auckland.ac.nz/quick_stereo.
A variety of possible applications include remote camera control, on-line calibration and rectification, simple 3D object and avatar reconstruction, web-based real-time stereo matching, artistic creation of auto-stereograms, etc.
SPH: Fluid on Pore Dynamics
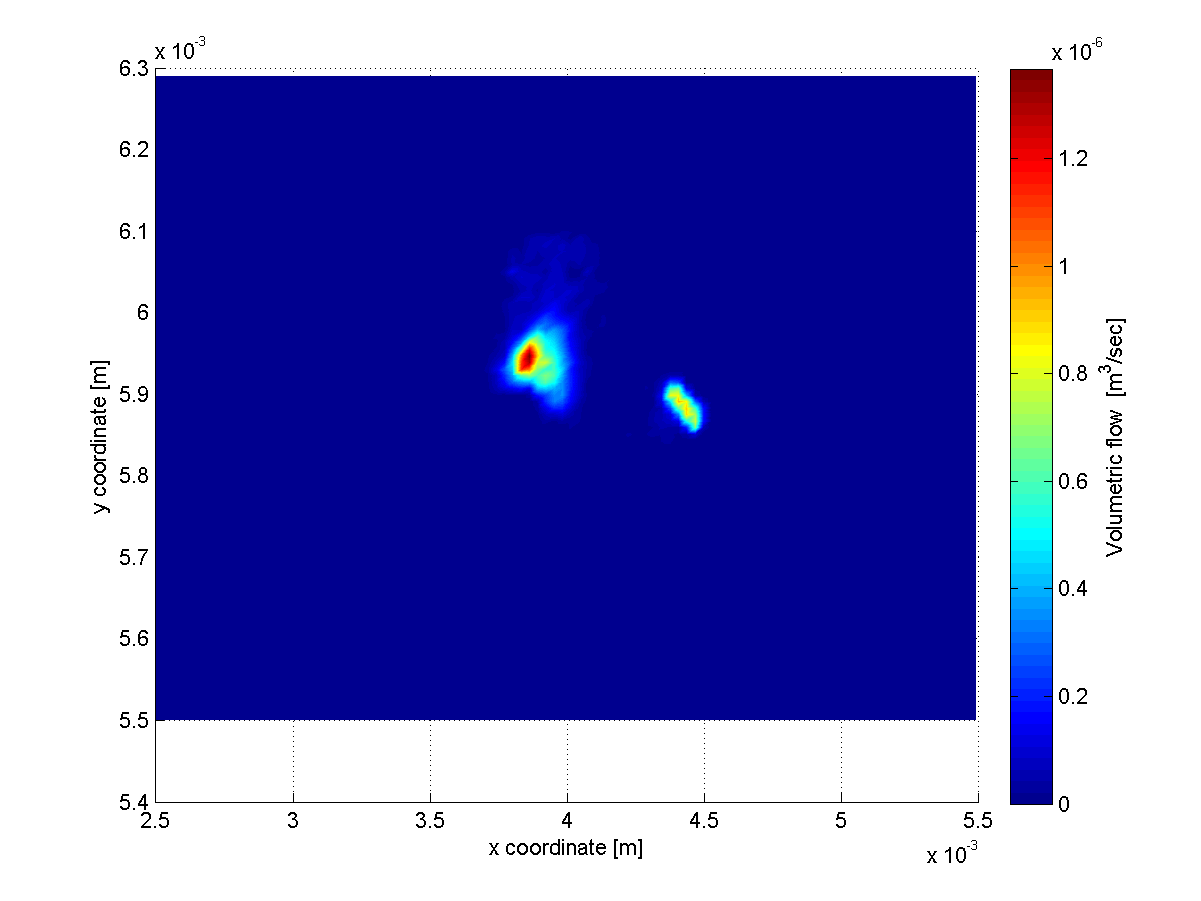
Figure 1. 2D Morton key used to find the location of a particle in a Tree. We travel down the tree structure using a pair of bits at the time, the first bit from the y coordinate the second from the x coordinate, the final key location for the particle is 1.10.01.10
We propose the use of the Lagrangian method Smoothed Particle Hydrodynamics (SPH) to model the behaviour of fluids through a pore structure of a volcanic soil core sample. Such studies are of importance to simulate preferential flows which are essential in the leeching of organic and chemical compounds in underground aquifers. Our approach combines X-ray CT imaging, and image processing techniques to extract the 3D porous structure. SPH modelling simulates water transport in the reconstructed 3D pore network using Navier Stokes governing laws. In this work an isolated pore is considered as a case-based study.
To obtain the computational solution of the set of differential equations over time the SPH approach is used. In SPH a set of particles (differential volumes) are introduces to approximate the continuum solution.
In Fig. 1 is shown the volumetric flow of the fluid at different depth levels. SPH provides with a point by point solution of the fluid behaviour.
Inferring causality using timelag analysis of BOLD data
Brain region interactions could reveal much about the structure of cognitive systems, and might be measurable using time-lagged correlation of BOLD data collected using fMRI. Previous researchers have described methods for detecting time-lagged correlation between region of interest (ROI) activation, primarily variants on Granger causality (GC). With appropriate caveats, GC can draw inferences from temporal precedence about effective connectivity between ROIs in a way methods like SEM and DCM do not. Some studies examined circumstances where time-lagged correlation between ROI activation can help draw causal inferences from BOLD data, and tested the limits of poor temporal resolution of fMRI on this method. The current project examines whether time-lag analysis can estimate the direction of causation in frontal and parietal areas known to act together in spatial working memory tasks. Independent Component Analysis is used to identify components whose interactions are then examined using the GC method. The method successfully identified causal relationships on replicated, artificially simulated data, but has not yet significantly detected GC relationships between ROIs in the spatial working memory task. Changes under way to better detect GC relationships include multivariate Granger analysis, a frequency-domain approach, and optimizing selection of components.
“Effective connectivity” can be defined as “the influence one neural system exerts on another†(Friston et al., 1993).Granger analysis (Granger, 1969) is here proposed as method to measure this influence using BOLD data. It has a root in econometrics, and it has had an explosion in use in neuroscience in past 5 years; though not entirely without controversy.
Granger analysis indicates the direction of influence, predictability, or arguably causality between brain regions. It measures the extent to which a timeseries can be predicted using past values of other timeseries. DTF is a well-established spectral-domain EEG equivalent of the Granger test which is applied to fMRI (Kaminski et al, 2001). Granger analysis has been expanded into multivariate models, although here a bivariate model is explained.
CUDA SPH
Simulating the collision between fluids as solids under gravity.
The use of Graphics Processing Units (GPUs)in computationally intensive applications is increasing due to recent frameworks that allow general purpose programming to be done on the specialized hardware of the GPU. This project summarizes the use of a GPU to improve the performance of a Smoothed Particle Hydrodynamics (SPH) program.
SPH is a computational method of simulating the behaviour of particles. Particles can be used to represent objects as a collection of points where physical properties are known. The interaction of particles in a system of objects can be simulated by interpolation using local particle neighbourhoods.
The Compute Unified Device Archtecture (CUDA) was used to develop a parallel implementation of the SPH algorithm developed by Alfonso Gastelum Strozzi. CUDA is the framework that allows general purpose code to be executed on NVIDIA GPUs.
So far, the physical calculations have been ported to the GPU and current work involves developing parallel octrees to efficiently search for particle neighbourhoods. Performance on physical calculations have been approximately 4x. Expected performance is to be at least 10x. This will be the goal of optimisation part of this research where the algorithms will be refined and hardware support maximised.
Belief Propagation Based Stereo
Tsukuba
Venus
The belief propagation based stereo approach approximates the minimum energy solution on graphical models such as Markov Chains, or Markov Random Field (MRF) of disparities. Our approach exploits a symmetric Cyclopean matching model, which accounts for visibility conditions, to construct epipolar profiles which are close to the human perception. Unlike traditional asymmetric matching models, this model can construct disparity maps with respect to the left, right or Cyclopean reference frame, as well as a Cyclopean image of a 3D scene depicted in a stereo pair, simultaneously.
We focused on both one-dimensional (1D), and two-dimensional (2D) belief propagation. 1D belief propagation has the advantage of fast computation, and low memory usage, but suffers matching errors due to the lack of vertical information. 2D belief propagation is more memory intensive, and has slower computation speed, but it can achieve high quality results using the powerful 2D message passing, where matching information is passed around the MRF, and decisions are made using all the image information.
The results of symmetric 2D belief propagation are shown.